Chapitre 4 :
LES LOIS DE NEWTON
I.
PREMIERE
LOI DE NEWTON :
Depuis
Aristote, on pensait q’une force était nécessaire pour maintenir constante la
vitesse d’un mobile. C’est Galilée qui émit l’hypothèse, à la fin du XVI°
siècle, que le mouvement d’un mobile pouvait se perpétuer en l’absence de
force. (Exemple : le curling)
1.1.
Enoncé du Principe de l’inertie vidéo:
Lorsqu’un
solide est soumis à des forces extérieures qui se compensent (solide isolé ou
pseudo-isolé), le vecteur vitesse ![]() G de son centre d’inertie ne varie pas :
G de son centre d’inertie ne varie pas :
![]()
![]()
Réciproquement, si le vecteur vitesse ne varie pas, alors la somme des forces
extérieures qui s’exercent sur le solide est nulle :
![]()
![]()
1.2.
Exemple :
On lance un mobile
auto-porteur sur une table horizontale. On obtient l’enregistrement
suivant :

Le centre d’inertie du
palet décrit un mouvement rectiligne uniforme. Le palet est soumis à son poids
P et à la réaction de la table R. La table étant horizontale et les frottements
négligeables, les forces se compensent. Soit :
![]()
On constate que le vecteur vitesse du centre
d’inertie est constant.
1.3.
Référentiels galiléens :
Si
on place la table à coussin d’air sur un chariot et que l’on lance le palet en
déplaçant la table, alors le vecteur vitesse n’est plus constant. Dans ce cas,
la trajectoire du centre d’inertie du palet est enregistré dans le référentiel
lié au chariot qui est en mouvement par rapport au référentiel terrestre.
Les
référentiels dans lesquels le Principe de l’inertie est applicable sont appelés
galiléens.
Les référentiels terrestre,
héliocentrique (étude du mouvement des planètes) et géocentrique (étude du
mouvement des satellites) sont considérés comme galiléen. Exemple vidéo.
II.
DEUXIEME
LOI DE NEWTON :
Enoncé de la deuxième loi de Newton vidéo:
Dans un référentiel galiléen, si le vecteur vitesse ![]() G du centre d’inertie varie, alors la somme des
forces extérieures
G du centre d’inertie varie, alors la somme des
forces extérieures ![]() qui s’exercent sur le solide n’est pas nulle. La direction et
le sens de
qui s’exercent sur le solide n’est pas nulle. La direction et
le sens de ![]() sont ceux de la
variation
sont ceux de la
variation ![]() du vecteur
du vecteur ![]() G du centre d’inertie du solide, entre deux
instants très proches.
G du centre d’inertie du solide, entre deux
instants très proches.
III.
TROISIEME
LOI DE NEWTON :
3.1.
Enoncé du principe d’
interactions vidéo:
Lorsqu’un corps A
exerce sur un corps B une action mécanique modélisée par la force FA/B
alors le corps B exerce sur le corps A une action mécanique modélisée par la
force FB/A .
Ces deux forces, qui
constituent l’interaction, ont, quel que soit l’état de mouvement de A par
rapport à B :
- la même droite d’action,
- des sens opposés,
- la même valeur : FA/B = FB/A
Ces
2 forces sont opposées :
![]()
3.2.
Application à la
propulsion :
·
Marche et frottement :
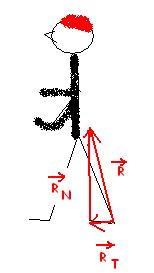
Le pied du marcheur (M) appui sur le sol (S) vers le bas et vers
l’arrière : il exerce une force FM/S. Le sol exerce sur le
marcheur une force FS/M directement opposée. Si on néglige l’action
de l’air, (M) est soumis à son poids P et à la force R = FS/M exercée par le sol, dirigée vers le haut et
vers l’avant.
La composante RN empêche le pieds de s’enfoncer dans le sol.
La composante RT propulse le marcheur vers l’avant. Cette composante
n’existe que si les surfaces en contact sont rugueuses : les forces de
frottement servent à la propulsion du marcheur.
·
Rôle des roues motrices dans le cas d’une
moto :
Les composantes orthogonales au sol : N1 et N2
compensent le poids de la moto et empêchent les roues de s’enfoncer dans le
sol.
Les composantes tangentielles : ces forces n’existent que s’il y a
des frottements entre la roue et le sol. R2T permet à la roue avant
de tourner, mais s’oppose au mouvement. R1T est dirigée dans le sens du mouvement :
c’est la force motrice.