RECORD DE SAUT EN LONGUEUR À MOTO
(Polynésie 09/2009)
La phase d’accélération du motard.
![]()
 1.
échelle1 cm (document) Û
2 m (réel)
1.
échelle1 cm (document) Û
2 m (réel)
G1G3 = 6,4 cm sur le
document donc G1G3 (réel) = 6,4 × 2 / 1 = 12,8 m

G3G5 = 12,8 cm sur le
document donc G3G5 (réel) = 12,8 ×
2 / 1 = 25,6 m
2.
Échelle des vitesses : 1 cm Û 2 m.s-1 donc
les longueurs des vecteurs viteses sont :
L(![]() ) = 8,0 × 1/2 = 4,0 cm
) = 8,0 × 1/2 = 4,0 cm
L(![]() ) = 16,0 × 1/2 = 8,0 cm
) = 16,0 × 1/2 = 8,0 cm
Rappel : Les vecteurs vitesses sont tangents à
la trajectoire et orientés dans le sens du mouvement.
3.
![]() =
= ![]() –
– ![]()
Le vecteur variation de vitesse démarre du point G3.
4.
Vecteur accélération ![]() au point G3 :
au point G3 :
![]()
![]() .
.
![]()
1 cm Û
2 m.s-1 ;
5.1.
la vitesse est proportionnelle au temps car
Le graphe de la figure 2 est une droite qui passe par l’origine,
v = k.t avec k pente de
la courbe
L’accélération a est défini par :
a =dV/dt ;
a = d(k.t)/dt = k
L’accélération de la moto est constante.
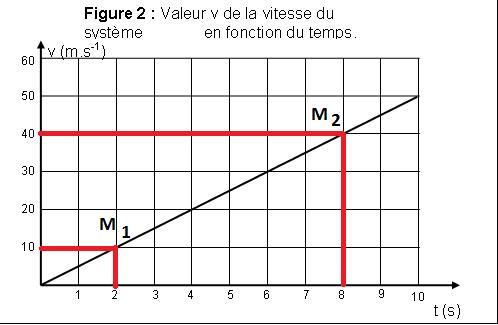 5.2.
Pour déterminer
l’accélération il faut calculer la
pente de la courbe v = f(t) . On prend 2
points de la droite :
5.2.
Pour déterminer
l’accélération il faut calculer la
pente de la courbe v = f(t) . On prend 2
points de la droite :
entre les points
M1 (t1 = 2 s ; V1
= 10 m.s-1)
M2
( t2 = 8 s ; V2 = 40 m.s’1)

On retrouve bien la valeur obtenue graphiquement en 4.
5.3. v = 160 km/h = 160x1000/3600
v = 44,4 m.s-1
v = a.t
t = v/a = 44,4/5,0
t = 8,9 s
A t = 8,9 s la moto atteint la vitesse de 44,4 m.s-1
Graphiquement avec d = f(t) on trouve la distance
parcourue par la moto quand elle atteint la vitesse v = 160 km/h
d
= 200 m

6.1 vidéo
Lorsqu'un système matériel A exerce une force
sur un système matériel B, alors celui-ci exerce sur le système matériel A une
force opposée :
![]()
Les droites d'actions des
2 forces sont confondues.
6.2 D’après le principe d’interaction la force
exercée par la moto sur la route est opposée à la force exercée par la route
sur la moto :
![]()
6.3
c) Pour faire l'étude mécanique du
système, il faut toujours définir dans l'ordre:
1) Le système: (moto, motard)
2) Le référentiel : la terre supposée référentiel galiléen, dans lequel
on pourra appliquer la seconde loi de Newton.
3) Le repère lié au référentiel :
![]()
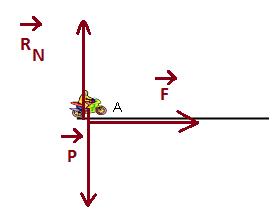
4) Somme des forces extérieures au système :
![]()
Les vecteurs poids et réaction normale au
poids sont opposés.
6.4 Tracé des vecteurs forces :
6.5